基础飞行¶
动力恢复/切断¶
这里动力恢复/切断功能可理解为动力开车/关车,当动力切断后,各驱动器输出中断,切断动作不需要判定条件,立即有效,故也可以用于应急时的受控坠机。
默认将动力恢复/切断功能映射至通道7,并且在遥控器上将通道7绑定至一个旋钮开关,即可通过旋钮控制动力恢复/切断。
加锁解锁¶
为了保证安全,无人机需要解锁后才能实现动力输出,在上锁状态下,多旋翼动力、舵面、发动机都处于锁住状态。
无人机默认上电进行加锁,可通过遥控器或地面站进行解锁操作。
-
通过遥控器解锁:操作遥控器拨杆内八字实现解锁;
-
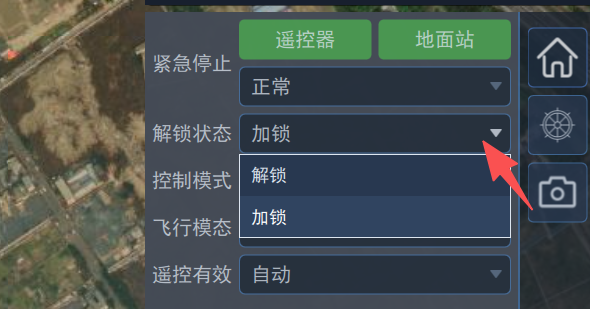
通过地面站解锁:在“解锁状态”下拉列表中选择解锁,如下图所示:
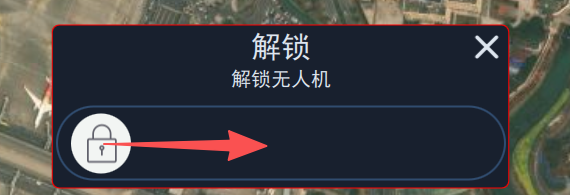
然后拉动滑块完成解锁操作确认,如下图所示:
飞行模态介绍¶
多旋翼无人机只有多旋翼飞行模态,固定翼无人机只有固定翼飞行模态,而垂起无人机包括两种飞行模态:多旋翼模态、固定翼模态。两种模态的切换有如下几种方式:
-
通过遥控器切换:通过遥控器8通道实现模态切换,一般在地面做检查时使用,切换至固定翼检查舵面是否正常,切换至多旋翼检查电机是否正常;
-
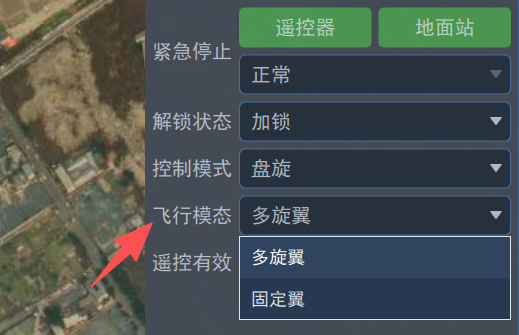
通过地面站切换:通过地面站“旋翼状态”下拉列表选择飞行模态,如下图所示:
-
自动切换:通过规划任务实现模态切换,例如加入“VTOL垂直起飞”航点实现多旋翼到固定翼切换;
-
外部控制切换:通过外部输入模态切换指令实现,注意这种切换模式需要搭配外部计算机使用。
飞行模式介绍¶
分类¶
无人机支持手动、自动两大类飞行模式。在手动模式下,通过操作遥控设备(如遥控器)给定飞行期望指令,在自动模式下由导航飞控自动生成期望指令。
手动模式¶
手动模式又包括增稳模式、定高模式、定点模式,根据飞行模态不同,每个模式下遥控器操作杆对应的控制量不一样。
在多旋翼飞行模态下,操纵杆控制量描述如下表:
| 模式 | 横滚杆 | 俯仰杆 | 油门杆 | 航向杆 | 归中响应 |
|---|---|---|---|---|---|
| 增稳 | 横滚角度 | 俯仰角度 | 油门 | 航向角速率 | 保持姿态角水平 |
| 定高 | 横滚角度 | 俯仰角度 | 垂直方向速度 | 航向角速率 | 保持当前保持高度 |
| 定点 | 左右速度 | 前后速度 | 垂直方向速度 | 航向角速率 | 保持当前位置、航向不动 |
在固定翼飞行模态下,操纵杆控制量描述如下表。
| 模式 | 横滚杆 | 俯仰杆 | 油门杆 | 航向杆 | 归中响应 |
|---|---|---|---|---|---|
| 增稳 | 横滚角度 | 俯仰角度 | 油门 | 航向角速率 | 保持姿态水平 |
| 定高 | 横滚角度 | 俯仰角度 | 空速 | 航向角速率 | 保持当前偏航角飞行,保持高度 |
| 定点 | 横滚角度 | 俯仰角度 | 空速 | 航向角速率 | 保持运动轨迹为直线,保持高度 |
可以通过遥控器5通道实现以上几种手动模式的切换,也可以通过地面站右侧控制面板发送相应模式设置命令。
自动模式¶
自动模式包括如下几种:
-
悬停模式:若处于多旋翼模态,则无人机在当前位置定点悬停,若处于固定翼模态,则无人机执行绕圆盘旋;
-
任务模式:无人机沿航线飞行并在航点位置做指定动作,需要由地面站规划航线并上传至无人机,否则无法进入该模式;
-
返航模式:无人机根据返航设置进行返航,例如返航至起飞点、返航至备降点、动平台返航等;
-
环绕模式:可设置环绕点、环绕方向,无人机绕该点完成飞行。
可以通过地面站右侧控制面板发送相应模式设置命令。