设备安装¶
坐标系定义¶
机体坐标系定义:以无人机重心为原点,机头前方为X轴,机身右侧为Y轴,下方为Z轴。如下图所示:
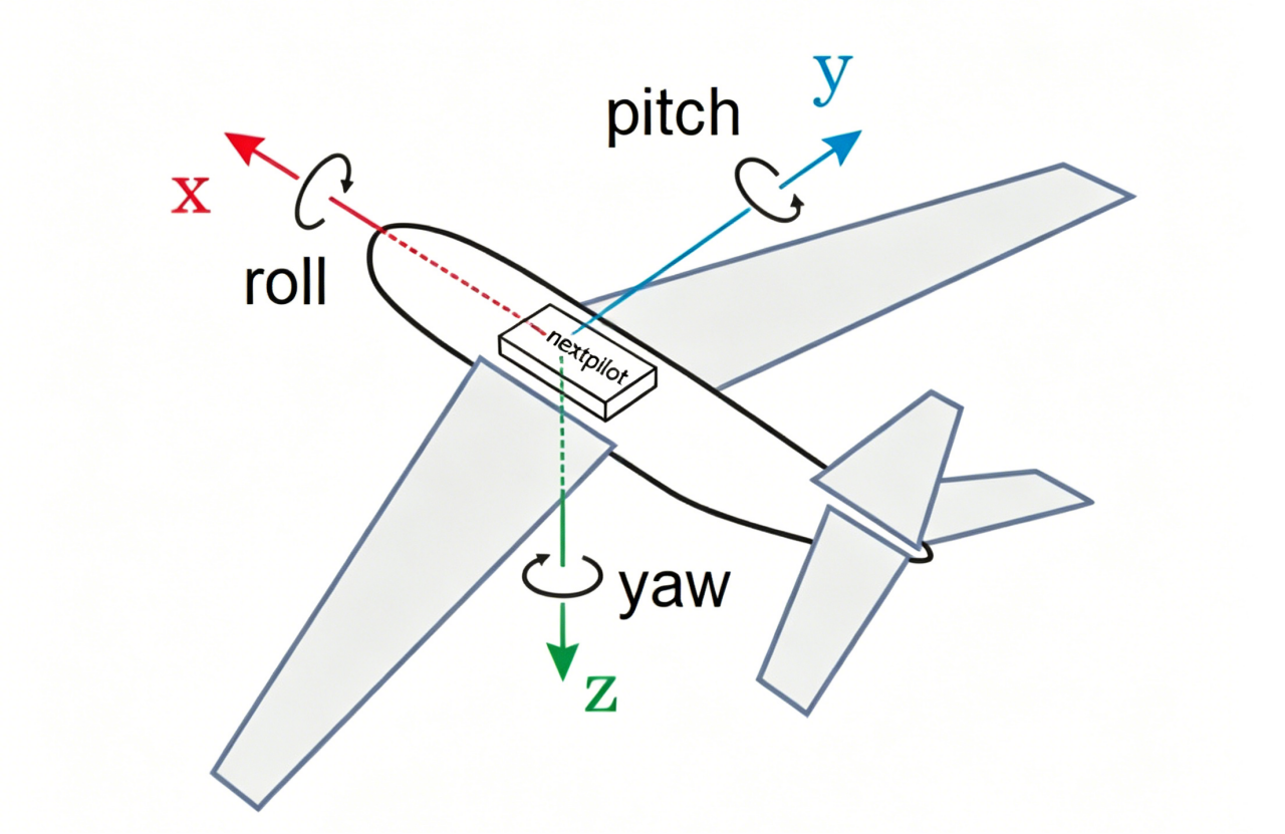
飞控坐标系定义:以飞控中心为原点,以连接器所在位置为后,飞控前侧为X轴,右侧为Y轴,下方为Z轴。飞控外壳印有坐标轴,如下图所示:
飞行控制计算机¶
在安装条件允许情况下,应将飞控安装至无人机重心位置,使飞控坐标系与无人机坐标系重合。
若无法安装在无人机重心,则需要设置飞控在机体平台上的安装位置偏移量。安装位置定义:飞控原点在机体坐标系下的坐标。对应参数为:EKF2_IMU_POS_X,EKF2_IMU_POS_Y,EKF2_IMU_POS_Z。
如果坐标系无法重合,需根据实际安装条件对应调整飞控安装角度,安装角度定义:以机体坐标系为参考,飞控坐标系相对于机体坐标系的旋转角度,对应参数为SENS_BOARD_ROT。
对于几种典型安装,对应的旋转角度、安装位置配置如下表所示:
| 安装示例 | 旋转角度 | 安装位置 |
|---|---|---|
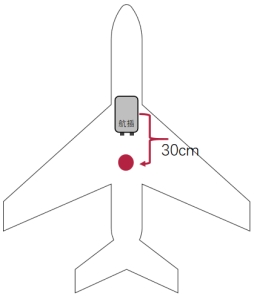 |
无旋转ROTATION_NONE | EKF2_IMU_POS_X=0.3 EKF2_IMU_POS_Y=0 EKF2_IMU_POS_Z=0 |
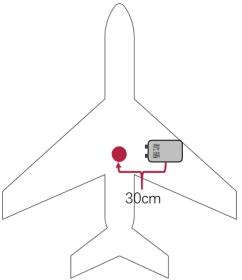 |
顺时针转90°ROTATION_YAW_90 | EKF2_IMU_POS_X=0 EKF2_IMU_POS_Y=0.3 EKF2_IMU_POS_Z=0 |
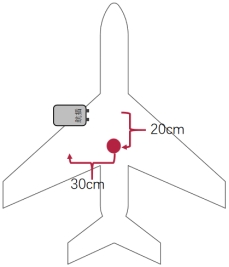 |
逆时针转90°ROTATION_YAW_270 | EKF2_IMU_POS_X=0.2 EKF2_IMU_POS_Y=-0.3 EKF2_IMU_POS_Z=0 |
机载卫导天线¶
默认卫星主天线在后,副天线在前,由主天线到副天线的方向是与机头方向一致,若不一致,则需要设置旋转角度。旋转角度定义:主天线到副天线连成向量与机体坐标系X轴夹角(目前默认仅支持在水平面进行旋转),顺时针旋转为正。对应参数为GPS_YAW_OFFSET。
关于飞控主副天线的连接请参考产品说明中电气连接部分。
默认卫星主天线安装在无人机重心,若不在重心,则需要设置主天线位置,对应参数为:EKF2_GPS_POS_X,EKF2_GPS_POS_Y,EKF2_GPS_POS_Z。安装位置定义:主天线所在机体坐标系下的坐标。
对于几种典型安装,对应的旋转角度、安装位置配置如下表所示:
| 安装示例 | 旋转角度 | 安装位置 |
|---|---|---|
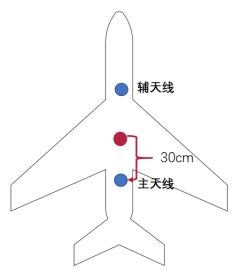 |
GPS_YAW_OFFSET=0 | EKF2_GPS_POS_X=-0.3 EKF2_GPS_POS_Y=0.0 EKF2_GPS_POS_Z=0.0 |
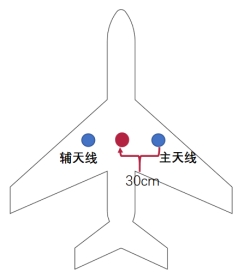 |
GPS_YAW_OFFSET=270 | EKF2_GPS_POS_X=0.0 EKF2_GPS_POS_Y=0.3 EKF2_GPS_POS_Z=0.0 |
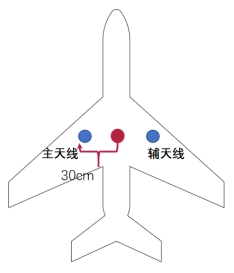 |
GPS_YAW_OFFSET=90 | EKF2_GPS_POS_X=0.0 EKF2_GPS_POS_Y=-0.3 EKF2_GPS_POS_Z=0.0 |
大气数据计算机¶
空速计并没有特别安装位置的要求,可通过粘接或者根据螺丝孔位尺寸固定至机体即可,然后将空速计动压孔和静压孔连接皮托管,注意空速软管不能有折叠以免堵住,导致压差测量不准。
地面差分基准站¶
作为一般RTK基准站使用¶
将基准站静置放置在地面,连接主天线即可。
动平台起降作业中使用¶
针对移动平台(如车、船)起降作业,为了实现无人机降落在移动平台的指定区域,飞控需要获取如下两个信息:
- 降落点与主天线的相对位置;
- 主副天线与动平台的相对角度。
以主天线为中心,移动平台前方为X轴正方向、右方为Y轴正方形,下方为Z轴正方向,建立坐标系,那么降落点在该坐标系下的坐标就是相对于主天线的位置,对应的飞控参数为RMB_DX、RMB_DY、RMB_DZ。
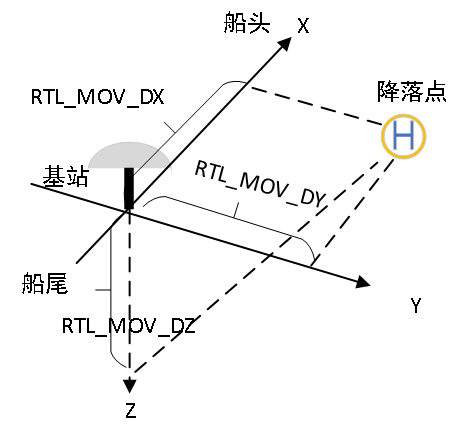
从主天线到副天线连成一条直线,该直线与X轴的夹角就是相对角度,对应的飞控参数为RMB_OFFSET_HDG。
几种典型的双天线朝向与参数的对应关系为:
-
辅天线在前、主天线在后放置时:RMB_OFFSET_HDG=0;
-
辅天线在右、主天线在左放置时:RMB_OFFSET_HDG=90;
- 辅天线在左、主天线在右放置时:RMB_OFFSET_HDG=270。